
Remember this little office on top of the tank? Exciting stuff going on there: Testing of the cameras that were just being installed in the last post! (Of course it will get even more exciting once we start rotating! :-))
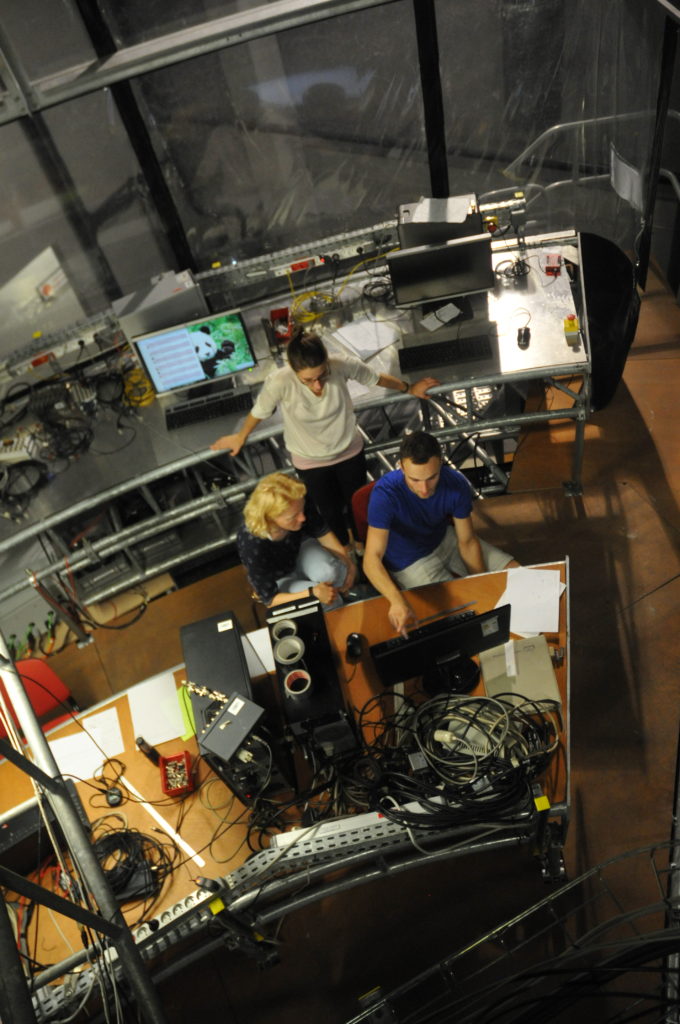
Of course we need to know which part of the tank the camera captures exactly, and what any given length on the pictures relates to in real life. That’s why we measured the topography in the last blog post.
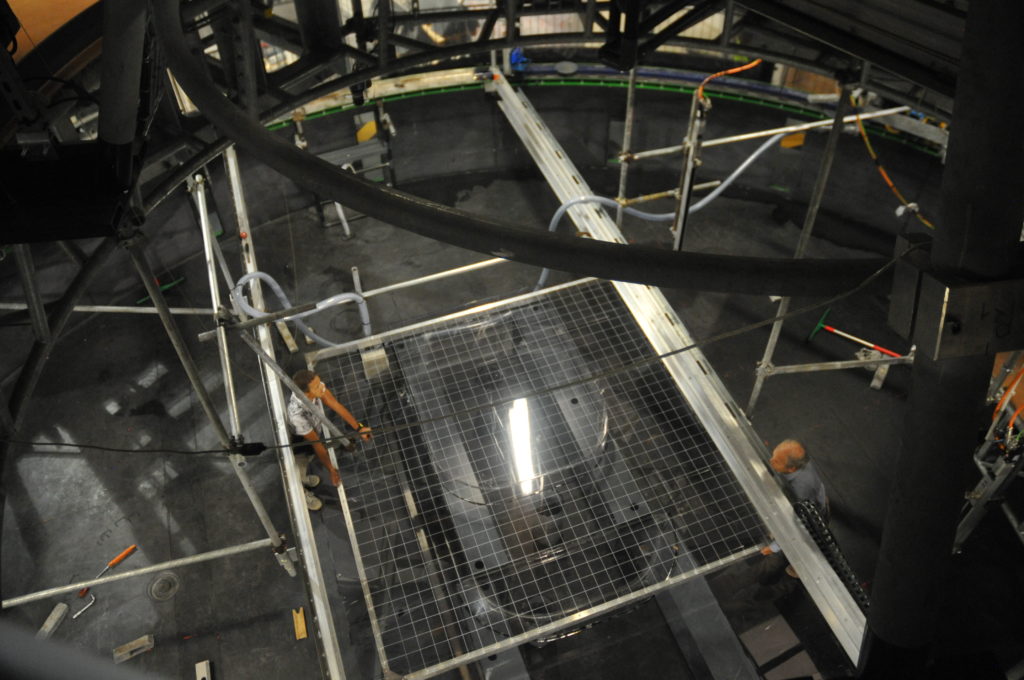
Below, you see that office again and additionally get a glimpse one floor down into the tank, and people moving a large grid there:

This grid, with exactly known dimensions and positioned in different ways above our topography, lets us calculate the focal length of the camera, which will ultimately give us the possibility to calculate back from pictures taken from far above to actual lengths in the tank. This is necessary to calculate the currents inside of the tank.
Easy as this sounds, I can assure you that it is not. So many considerations need to go into this now, for example where do we want to put the origin of the coordinate system when we interpret the data? And how should the axes be oriented? We are in the Southern Hemisphere, so should we use this to determine the direction of the x-axis? Or should the direction of the jet that we will be introducing into the tank give us our x-axis orientation? The source (where we will have the inflow of the jet later) seems like an obvious origin of a coordinate system, but we will move it around on the topography, so it really is not.
Decisions made now will make it a lot more convenient (or inconvenient) to work with the data for years to come, so lots of different considerations going on right now…

And there are two cameras that need to play well together, or at least the data coming from them needs to be connected seamlessly to each other…
One thought on “Calibrations and decisions”
Comments are closed.